加州大学伯克利分校Millisystems仿生实验室的大卫•扎鲁克、安德鲁•普林、尼克•科胡特和罗纳德•菲林从昆虫身上汲取灵感,制造了STAR(自主爬行机器人)。
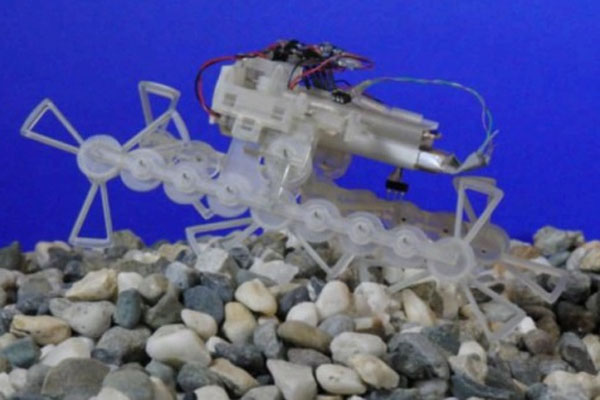
机器人有六条腿,能控制腿的爬行角度,可以执行许多需要穿越障碍物的演习。降低腿与平面的角度,提高光滑表面的爬行速度,从而大幅降低接触角和触点压力。所以,机器人可以趴开腿,从门缝爬出,然后立起来,继续正常爬行。
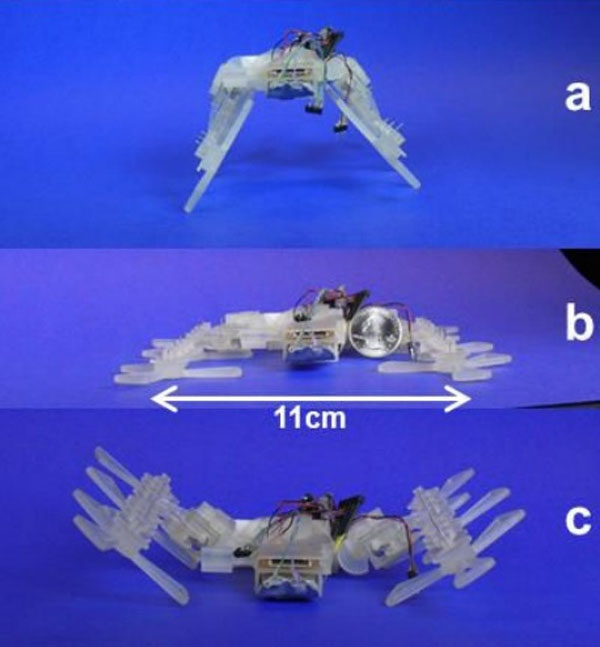
不同爬行姿势的STAR
a)爬行腿与平面成正角度;b)爬行腿与平面齐平;c)爬行腿与平面成负角度
STAR是专为快速制造而设计的。它的每一个组件(除了电子元件),身体核心、电机外壳、正齿轮和腿部,都使用ProJet 3000 3D打印机建成。打印机的精度约为0.05毫米。该机器人设计时就考虑到方便安装、轻松部件更换,因此全套机械装配只需要大约30分钟。
STAR在光滑表面的最快爬行速度为5.2米/秒(每秒爬行身体长度的43倍)。可以控制其进行直线或转弯爬行。腿在身体两侧滑动,以减少与地面的碰撞,实现更好的稳定性和转向控制。
这是第三版STAR机器人,研究人员已经对其进行了一些机械上的改进和巩固,以减少在高速运行时发生碰撞损坏的情况。






