E-NABLE由罗彻斯特理工大学的科学家乔恩·斯卡尔(Jon Schull)成立于2013年,作为一个网络组织,聚集着来自全球的志愿者。他们用自己的3D打印机、设计技能、个人时间制作免费的3D打印义肢,提供给有需要的人士。
几位顶级设计师合作秉承易于打印与安装的宗旨,设计并开发了“猛禽号”机械手(Raptor Hand)。其特点在于3D打印连接销,模块化的拉伸系统,兼容尼龙和皮革外壳。该设计采用知识共享—署名—相同方式共享许可协议。
所有设计文档可从Thingiverse或YouMagine或我爱3D下载。可采用e-NABLE网页端应用程序Handomatic,轻松生成适合打印尺寸的STL文件。
与e-NABLE以前的设计相比,猛禽号机械手具有以下特色:
•打印更方便、更快捷(无需支撑结构)
•安装更方便、更快捷(无需芝加哥螺丝,简化了绳索安装)
•经过改进的张力系统(模块化设计,便于后续研发)
【操作指南】
操作指南可由此下载。
【打印说明】
•根据需要缩放组件(猛禽号机械手允许100%至170%的比例调整)
-100%比例时,手掌部分为55毫米
-测量手掌最宽部分,再加5毫米预留给填充材料,然后除以55得到缩放因子(例如,如果手掌65毫米宽,则65+5 =70,70 / 55 = 1.27 ,因此你的缩放倍数是1.27或127%)
•打印时无需支撑结构(模型设计时,手掌和护腕内置一定的支撑结构)
•建议采用PLA材料
•建议设置0.2毫米层高,35%填充率,2个壳
•请参阅文件名,其中含有描述性说明。文件名末尾括号中的数字表示该STL文件需要打印的副本数,以实现完整装配。
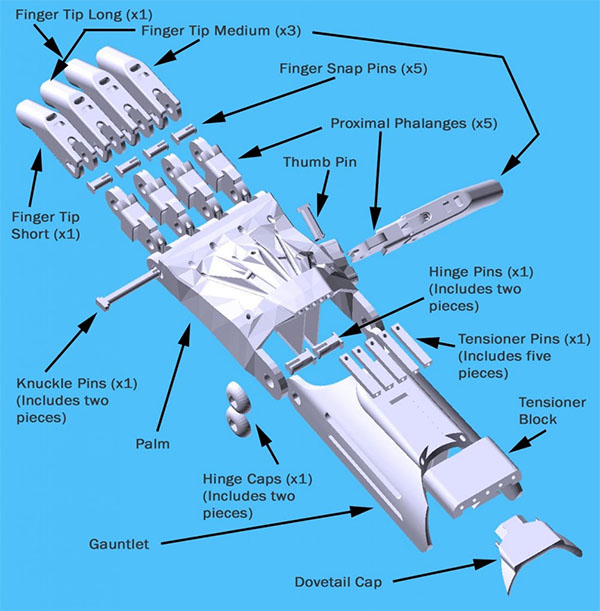
【组件参考图】
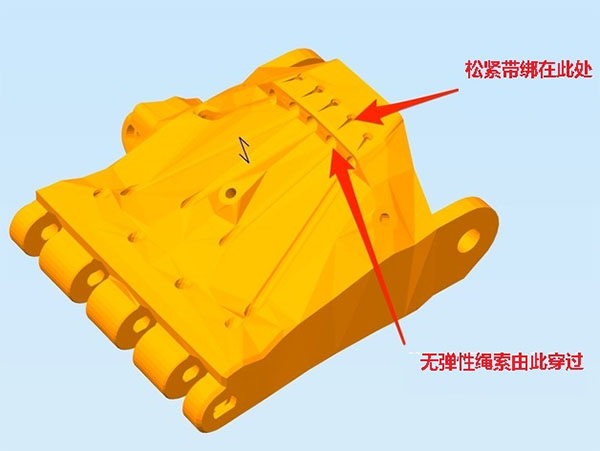
【绑上松紧带】
在最近的修订版中,取消了绑松紧带的系杆。现在,松紧带应绑在手掌后部的楔形孔,如下图所示:
文章来源:MagicFirm






