这是一个最简单的机器人,简单到可能很多人都不认为其是机器人,而顶多算一个有点雷的减压用的小玩意儿。这里之所以选择其作为PVCBOT系列机器人的第一个项目——PVCBOT零号机器人,其意义更多是在于其既可以让初学者练练手,也可以给老手们推荐一个闲来无事时的消遣玩意儿,也算是PVCBOT系列机器人的一个前奏和热身吧。

为了提高趣味性,当前项目提供多个不同版本的选择,这是最简单的A版。
这实际上是一个振动机器人,即以偏心摆锤马达的震动效果作为挪动的动力,算是一种非常简单的BEAM机器人。如果了解BEAM机器人的朋友可能会知道这其实是一个牙刷振动机器人的翻版(国外爱好者用牙刷改装的),也可以说是一个PVC版的牙刷振动机器人。为了切合PVC的主题,这里把原来牙刷振动机器人的牙刷底座,换成用PVC材料做成类似昆虫的脚,整个造型就像一只臭虫,由于振动时接近狂飙一样的不规则运动方式,所以起名为“暴走的臭虫”。
PVCBOT-(0-A1)版制作视频教程
PVCBOT-(0-A2)版制作视频教程
基本原理
本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。本项目虽然驱动原理比较简单,但是由于造型的差异其实分成了多款不同的机器人,同时由于结构的不同也导致运动的规律和效果有所不同。这里的A版,主要实现了随着震动做不规则运动的基本效果。

驱动原理
本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
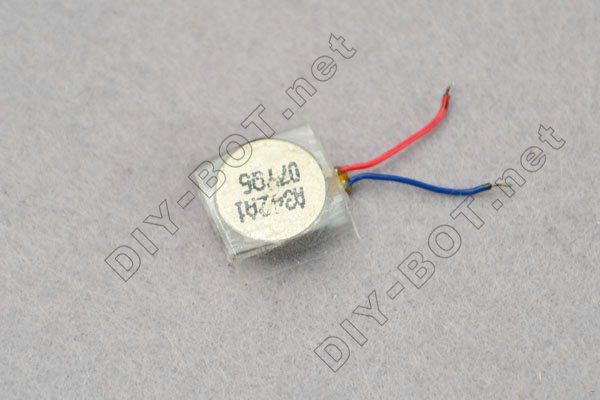
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。

关于振动机器人的详细原理,可以参见《制作篇——振动机器昆虫——基本原理》中的相关内容。

图中左边的两个振动电机是在普通电机上接了偏心锤,而右边两个扁平的其实把电机和偏心锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。
一般而言,扁平振动电机的振动(幅度)效果不如普通的振动电机,但是扁平振动电机的耗电小,可以持续运动的时间更长。
在当前项目中,由于采用的振动电机的不同,对于A版机器人我们又分别分成A1和A2两个子版本,其中A1版采用的是普通的振动电机,而A2版采用的是扁平的振动电机。
准备工作
|
序号 |
名称 |
规格 |
数量 |
备注 |
|
1 |
PVC线槽 |
横截面25X15mm,长10cm |
1单位 |
肢体结构 |
|
2 |
微型振动电机 |
普通振动电机(手机专用) |
1个 |
动力,A1版 |
|
3 |
扁平振动电机(手机专用) |
1个 |
动力,A2版 |
|
|
4 |
钮扣电池盒 |
CR-2032电池盒 |
1个 |
电池夹 |
|
5 |
钮扣电池 |
CR-2032,3V |
1个 |
电源 |
|
5 |
开关 |
小型拨动开关 |
1个 |
电源开关 |
|
7 |
导线 |
塑料胶皮铜芯导线 |
1根 |
电路连接 |
注意:以上表格中列出了两种微型振动电机,分别用在A1和A2两个不同的版本上。
提示:为了方便PVC材料的用量计算,我们选取几种常用规格的PVC线槽作为PVCBOT专用线槽,制定出标准的长度单位,而每个PVCBOT项目的PVC线槽用量都是以这些标准单位来计量的。
在当前项目中PVC材料的用量就是1个单位(1根)的长为10cm,横截面为25X15mm 的PVC线槽。
以下为各种器材的实物照片。

制作过程
在当前项目中,由于采用的振动电机的不同,对于A版机器人我们又分别分成A1和A2两个子版本,其中A1版采用的是普通的振动电机,而A2版采用的是扁平的振动电机。
底座
【1-1】选用横截面为25*15mm左右的PVC线槽的盖子部分,截取5.5cm长的一段。

【1-2】把线槽盖子两侧的轨道裁切掉,得到一根长5.5cm、宽1.5cm左右的PVC方条。

【1-3】用铅笔在PVC方条上画好要裁剪的标记线,标志线的具体位置尺寸如图所示。
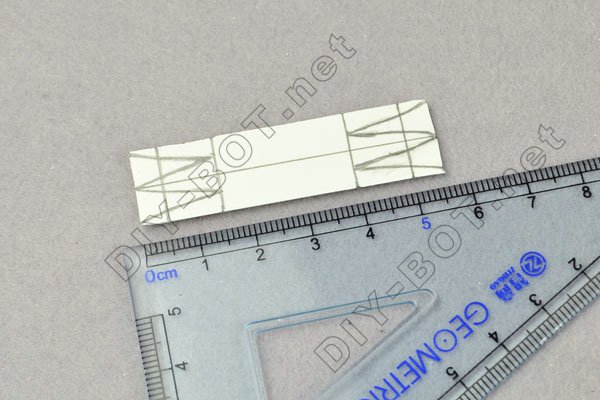
【1-4】把PVC方块用剪刀沿着画好的标记线剪切下来,做成六足底座的平板结构。

【1-5】用尖嘴钳沿着中间两根标记线把两侧的腿弯折成一定的角度。

弯折好底座的六条腿。
注意:要让画有标志线的一侧位于底座的内侧。

【1-6】再用嘴尖钳沿着六条腿的前端的标记线往外侧轻轻折一下,做成脚尖。
提示:这里弯折时要小心一点,避免把脚尖折断。
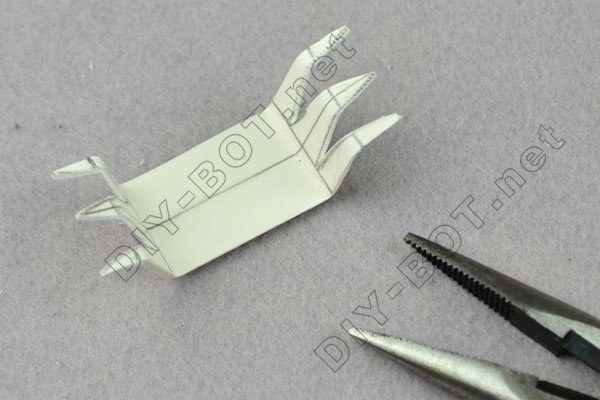
调整各脚尖的弯折程度,使得整体保持支撑的平衡,这样就做好了六足底座。

电池盒
【2-1】把六足底座上用502胶水固定在钮扣电池盒底面。可以先涂少量502胶水在六足底座的面上,然后快速往钮扣电池盒底面扣上去,要求六足底座处于钮扣电池盒底面的中心位置,粘贴时的动作要快且准。


开关
【3-1】用尖嘴钳把钮扣电池盒的正极引脚折平。
注意:折的时候要一次到位,避免反复多次导致引脚被折断。

【3-2】用热熔胶把拨动开关粘贴在钮扣电池盒边上突出的一侧。
注意:由于当前项目是振动机器人,为了防止拨动开关受到振动而容易导致脱落,最好是用热熔胶把拨动开关外壳也适当包裹起来,当然从美观考虑也要注意控制热熔胶的用量。

注意:拨动开关的安装位置正好可以而让拨动开关中间的引脚抵到前面被折平的钮扣电池盒的正极引脚。

【3-3】把拨动开关中间的引脚和电池盒的引脚焊接在一起。

电机
这里我们要借助热熔胶把振动电机固定到六足底座上。
通常情况下,不建议使用502胶水粘贴精细的部件。因为502胶水的渗透性太强,如果控制不好用量容易把不该粘贴的地方也粘贴起来了。
【4-1】对于A1版的振动机器人,采用的是普通振动电机,直接把热熔胶滴在振动电机的底座上,然后把振动电机粘贴在底座中心,最后再涂一些热熔胶把振动电机的外壳都包裹起来。
注意:要让振动电机前端边缘与PVC线槽边缘平齐(如图所示),避免偏心锤转动时碰到PVC线槽。

【4-2】对于A2版的振动机器人,采用的是扁平振动电机,建议也是要使用热熔胶把振动电机固定在底座上。
注意:假如一定要使用502胶水的话,因为502胶水的渗透性特别强,为了防止胶水渗入电机内部导致电机卡死失效,必须先用透明胶布把扁平振动电机包裹起来,然后才用502胶水把振动电机固定到底座上。
如果用热熔胶的话,直接把熔化了的热熔胶滴在底座上,然后把扁平振动电机光滑平整的一面朝下,对着热熔胶扣上去,等热熔胶冷却凝固即可。
注意:因为扁平振动电机本身有比较短的导线引出,假如希望直接使用该导线而不用增加额外的延长导线,则让扁平振动电机突起部分位于侧边(如图所示),这样两根导线刚好可以延伸到各自的焊点(拨动开关引脚和电池盒引脚)。

电路
【5-1】对于A1版,按照前面电路原理图、实物连接图,或者右边的焊接示意图,把整个电路焊接好。
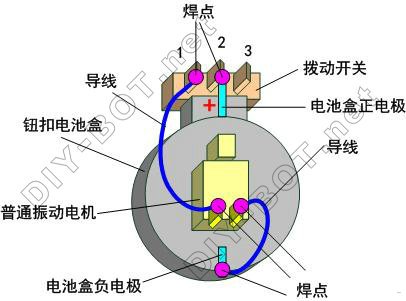
A1版的普通振动电机只有金属引脚而没有导线引出,需要用额外的导线焊接起来。

【5-2】对于A2版,按照前面的电路原理图、实物连接图,或者右边的焊接示意图,把整个电路焊接好。

A2版的扁平振动电机通常都有导线引出,假如该导线足够长,或者通过调整振动电机的固定方位(突起部分位于侧边)使得导线刚好够得着,则就不需要额外的延长导线。

【5-3】到此为止,我们就完成了整个振动机器人的制作。

效果展示
以下为制作完成的机械臭虫的造型效果。










