作为PVCBOT系列机器人制作的起点,我们首先介绍的是BEAM机器昆虫,这不是单独的一只机器昆虫,而是一组好几只不同种类的机器昆虫。 这些机器昆虫的本质原理其实都是一样的,不过采用了不同的外形装饰之后,它们就变身成为截然不同的机械物种了。
也许这似乎有点充数的味道,但却是我们刻意安排的,因为作为PVCBOT入门的零号项目,除了尽可能简单易于上手之外,我们也希望借此看门见山的向大家传递PVCBOT一贯所倡导的理念——“性能重要,外观也同样重要”,而且这也正是符合BEAM机器人所应具备的特质。
作为第二只振动机器昆虫,这次在此前机器昆虫基本机体的基础上组装的是黄蜂机器人,我们也称之为“机械黄蜂”。和前面的机械蜻蜓相比,机械黄蜂除了翅膀不同之外还多了一个大肚子。
为了统一规范,当前机械黄蜂的编号为PVCBOT-0-DC2,即PVCBOT的0号机器人干电池(Dry Cell)类型的第2版。
基本原理
当前项目的机器昆虫属于振动机器人,也就是借助振动产生的动能进行移动的机器人。

器材准备
|
序号
|
名称
|
规格
|
数量
|
用途
|
|
1
|
PVC线槽
|
横截面25X15mm,长15cm
|
3单位
|
肢体结构
|
|
2
|
电机
|
N20小电机,轴径1mm
|
1个
|
动力
|
|
3
|
偏心锤
|
轴孔径1mm
|
1个
|
振动偏心轮
|
|
4
|
电池
|
7号干电池
|
1个
|
电源
|
|
5
|
电池盒
|
单节7号电池盒
|
1个
|
电池夹
|
|
6
|
开关
|
小型拨动开关
|
1个
|
电源开关
|
|
7
|
垫片
|
M3红色垫片
|
3个
|
垫电池盒、装饰
|
|
8
|
螺丝/螺母
|
M2X6mm平头螺丝/螺母
|
1对
|
固定电池盒
|
|
|

制作过程
背板
【1-1】选用横截面为25*15mm左右的PVC线槽的盖子部分,截取9cm长的一段。
提示:对于线槽盖子的截取技巧,请参考《技巧篇——机械加工——开料》中的相关内容。

【1-2】把线槽盖子两侧的轨道裁切掉,得到一根长9cm、宽1.5cm左右的PVC方条。
提示:对于裁切线槽盖子的轨道的技巧,请参考《技巧篇——机械加工——切条》中的相关内容。

【1-3】用铅笔在PVC方条上距离其中一侧边缘4cm的地方用铅笔画一根横截线,并且在横截线中央位置做一个打孔标记。
提示:对于画标记线的技巧,请参考《技巧篇——度量标记》中的相关内容。

【1-4】在打孔标记上钻一个直径2mm的小孔,之后用橡皮擦把铅笔的痕迹涂干净,最后得到一块背板。
提示:对于在PVC上钻孔的技巧,请参考《技巧篇——机械加工——钻孔》中的相关内容。

腿部
【2-1】选用横截面为25*15mm左右的PVC线槽的槽部分,截取9cm长的一段。

【2-2】把线槽方槽的两个侧边裁切掉,得到一根长9cm、宽差不多2.5cm的PVC方条。
提示:对于裁切线槽方槽的侧边的技巧,请参考《技巧篇——机械加工——切条》中的相关内容。

【2-3】用铅笔在PVC方条上沿纵向画两根等分宽度的直线;横向的中央位置(4.5cm处)画一根中心横截线;中心横截线两侧大约7mm的位置,再各画一根横截线;
在上两根横截线外侧各画如K字形的截线,具体尺寸位置如图所示(大概位置就行,不用很精确)。
提示:对于画标记线的技巧,请参考《技巧篇——度量标记》中的相关内容。

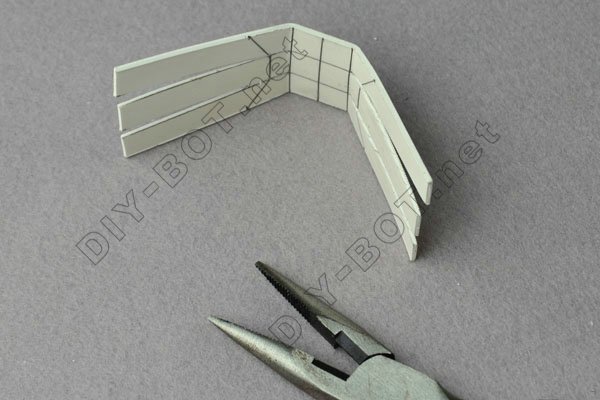
【2-4】用剪刀从PVC方条两端沿着纵向两根等分线往中间裁剪,剪到中心横截线左右两边的两根横截线的位置,这样得到类似六条腿状的底座结构。

【2-5】用尖嘴钳沿着中心横截线左右两边的两根横截线的位置,把六条腿状的底座结构两侧各三条腿向画了线的内侧弯折到一定角度(约30度)。
提示:对于弯折线槽的技巧,请参考《技巧篇——机械加工——折弯》中的相关内容。

【2-6】用尖嘴钳沿着外侧的四条腿上的斜线,把这四条腿往内侧再弯折一点。
这样本来挨在一起并且处于同样平面上的六条腿,就互相错开位置,呈立体状的六足底座结构。

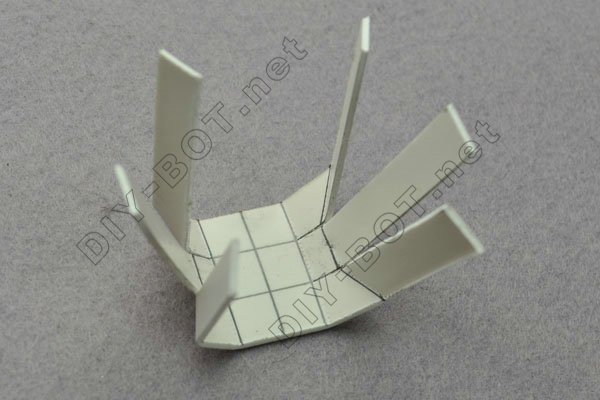
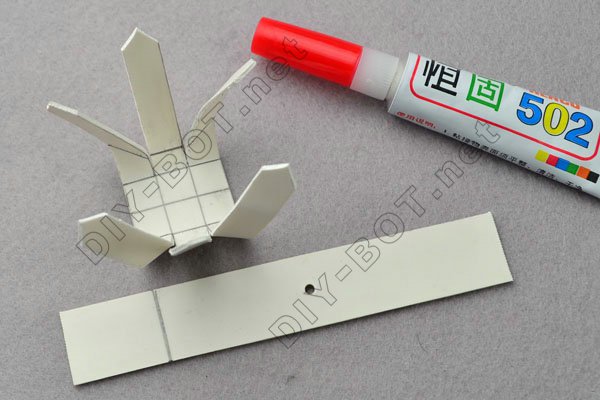
【2-7】用剪刀把六足底座结构的每条腿前端都剪成尖的三角锲形。

【2-8】把六足底座结构立起来,调整各条腿的弯折角度,使得底座处于水平位置。


肢体
【3-1】对于此前做好的背板,离打了孔位置5cm的一侧开始,距离边缘2cm的地方,用铅笔画一根横截线。

【3-2】把六足底座用502胶水贴到背板上。
提示:对于502胶水的使用技巧,请参考《技巧篇——材料粘贴——502胶水》中的相关内容。
六足底座的两侧腿的位置要对齐背板两侧,并且六足底座前端边缘对齐刚才用铅笔画好的横截线的位置。
完成基本的肢体结构。
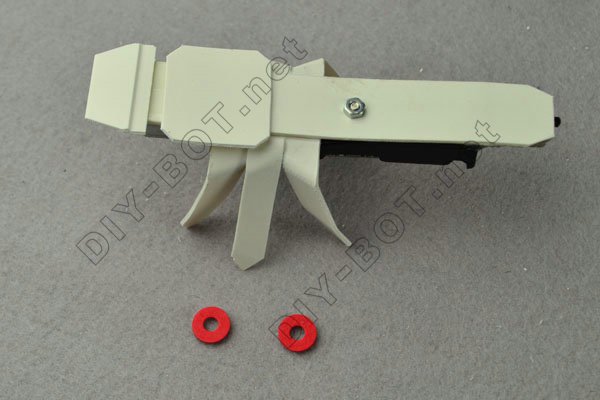
电源
【4-1】把肢体结构平放在桌面上,让六足底座朝上。

【4-2】在背板的孔上放上一片垫片。

【4-3】把电池盒放到背板上去,并与背板平行。用平头螺丝从电池盒内侧穿入,穿过电池盒与背板之间的垫片,最后从背板上的孔穿出。

【4-4】把从背板穿出的螺丝,扭上螺母并且拧紧。这样就把电池盒固定在肢体的背板下了。
提示:对于拧螺丝的技巧,请参考《技巧篇——接合装配——紧固连接》中的相关内容。

电机
【5-1】把固定在肢体上的电池盒两端红色和黑色的导线,各留出长约1cm左右长度,然后剪断。

【5-2】把上一步骤中剪断得到的黑色导线,焊接到电机的一个电极上。再把背板前端(安装了六足底座一侧)的电池盒导线(图中红色)焊接到电机的另一个电极上。
提示:更多关于焊接的技巧,请参考《技巧篇——电路焊接》中的相关内容。

【5-3】把电机放置在背板前端(安装了六足底座一侧)的正中位置,并且让电机的后部顶住六足底座边缘。用透明胶布把电机和背板捆绑缠绕在一起,使得电机固定在背板下面。


开关
【6-1】把电机电极上焊接的黑色长导线沿着电池盒边缘延伸到电池盒后端(原理六足底座)。把位于背板后端(没有安装六足底座一侧)的电池盒导线引出(图中黑色)。把两根导线引出的部分都剪到一样长,并且在前端上好焊锡。
提示:更多关于导线上锡的技巧,请参考《技巧篇——电路焊接——导线上锡》中的相关内容。
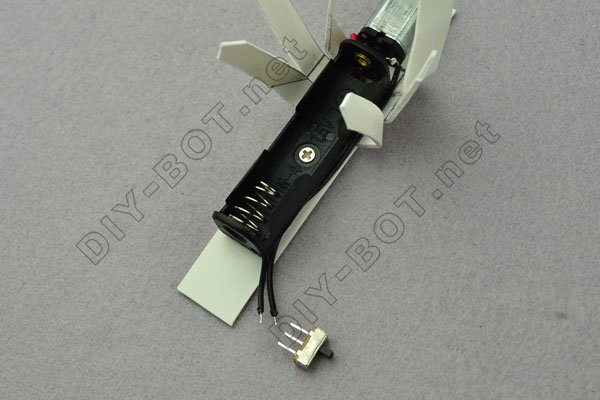
【6-2】把两根黑色导线焊接到拨动开关的两个引脚上(中间引脚和另外任意一个引脚)。
提示:更多关于焊接的技巧,请参考《技巧篇——电路焊接》中的相关内容。

【6-3】用热熔胶把拨动开关固定在背板的尾部,其中让拨动开关的外壳边缘与背板边缘对齐。
提示:更多关于热熔胶的使用技巧,请参考《技巧篇——材料粘贴——热熔胶》中的相关内容。

为了美观,把两根焊接在拨动开关上的黑色导线尽可能理顺埋在背板下而不要漏出来。特别对于从电机上引出的那根导线,要让它从电池盒边缘与背板之间的空隙走线,为了防止翘出来可以在走线沿途点上几滴热熔胶。

偏心锤
【7-1】要把偏心锤安装到电机的转轴上。
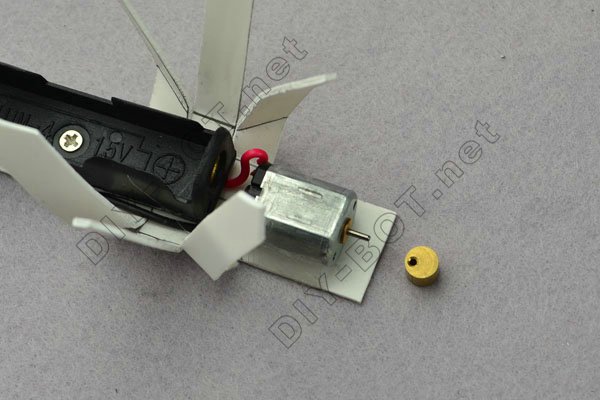
【7-2】把偏心锤压入电机轴上不要太深,最后要让偏心锤于电机外壳之间留一点空隙。
注意:如果偏心锤装上之后不够紧的话,则考虑从偏心锤小孔的另一侧压入电机轴(偏心锤小孔两端的开口可能不一样大的)。

躯干
【8-1】先制作“胸板”:先剪一块边长为2.5cm的正方形PVC板,要把它的四个角剪成斜的倒角。
再制作“头部”:取线槽的方槽部分的侧边,剪成一个梯形PVC板,尺寸大约是上底长1.5cm、 下底长2cm、高1.5cm,其中下底一端是方槽侧边有轨道的一侧(如图中最下面有轨道的分层结构,与之前的机械昆虫正好向反)。
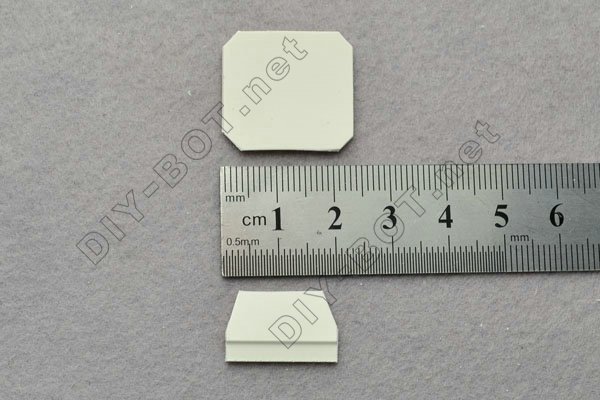
【8-2】用502胶水把头部粘贴在肢体的正前方(靠近六足底座的一侧),其中头部结构的梯形短边一侧向前方。从距离头部后端大约3mm的位置开始,把胸板也用502胶水粘贴在肢体上。
提示:对于502胶水的使用技巧,请参考《技巧篇——材料粘贴——502胶水》中的相关内容。

眼睛
【9-1】把两片红色的M3垫片当作机器昆虫的眼睛。
【9-2】用502胶水把两片垫片粘贴在头部前端的两侧(比机械蜻蜓靠前)。
提示:对于502胶水的使用技巧,请参考《技巧篇——材料粘贴——502胶水》中的相关内容。
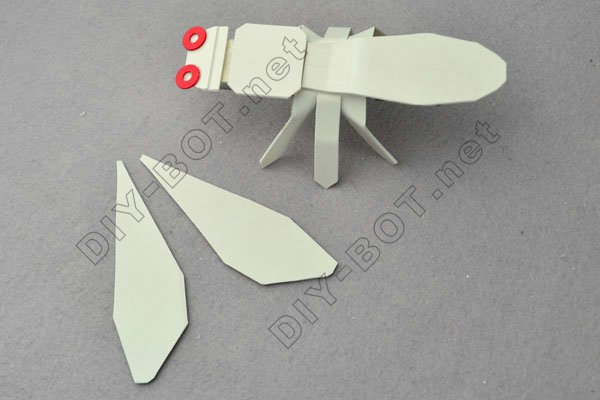
腹部
【10-1】剪一段大约长6cm、宽2.5cm左右的PVC方块。用铅笔如图所示画好类似纺锤形的剪裁标记线。

【10-2】把PVC方块用剪刀沿着画好的标记线剪切下来,做成机器昆虫的腹部。然后用橡皮擦把标记线擦干净。

【10-3】用尖嘴钳把腹部平口的一侧弯折呈一个阶梯状。


【10-4】把腹部用502胶水粘贴在背板上,其中腹部平口一侧要顶到胸板后端,502胶水只涂在腹部平口一端附近即可。
注意:上一步骤把腹部折成阶梯状主要是因为要粘贴到的背板上有螺丝和螺母突出来,需要借助阶梯状结构绕开螺丝和螺母。
提示:对于502胶水的使用技巧,请参考《技巧篇——材料粘贴——502胶水》中的相关内容。

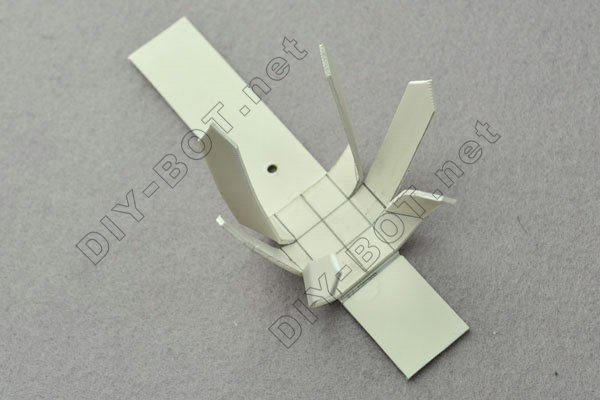
翅膀
【11-1】剪两块大约长7cm、宽2.5cm左右的PVC方条。用铅笔在两块方条上画好要裁剪的标记线,标志线的具体位置尺寸如图所示。
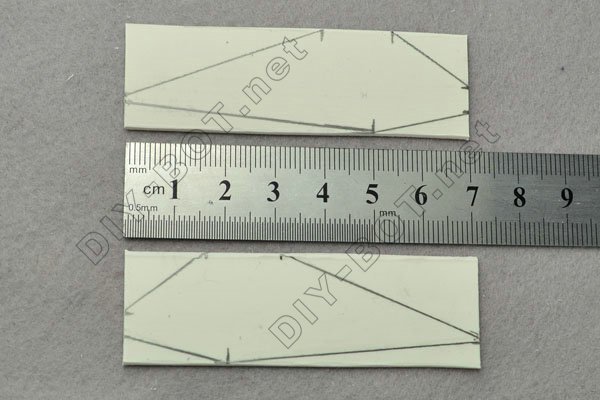
【11-2】沿着标记线把方条的多于部分剪裁掉,最后做成一对翅膀。同时用橡皮擦把标记线擦干净。

【11-3】用502胶水把翅膀粘贴到胸板顶部。翅膀前端要差不多与胸板前端对齐,两片翅膀在腹部位置距离最近的差不多1cm左右,要求翅膀与胸板和腹部的接触位置都要用502胶水粘贴在一起。
提示:对于502胶水的使用技巧,请参考《技巧篇——材料粘贴——502胶水》中的相关内容。

最终完成整个机械蜻蜓的外形设计与制作。
调试完善
以下是具体调试的过程:
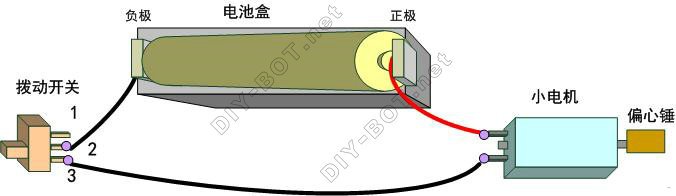
【1】参照前面的电路原理图、实物连接图,或者是下面的焊接示意图,检查整个电路是否连接正确。
【2】把1节7号干电池安装到背板下面的电池盒里。打开拨动开关,电机应该能够带动偏心锤高速转动,并且产生强烈的振动。
假如电机没有反应,则:
1、对照电路原理图或者实物连接图,检测电路连接是否正确;
2、检查电路各连接点是否有接触不良的地方;
3、检查电池是否正常(可使用万用表测量电池的电压是否正常);
4、检查电机是否正常(可使用实验电源直接接到电机电极上看是否能够转动);
5、假如前面4项都没有问题,则有可能是开关有问题,看是不是开关被胶水渗入(假如用502胶水粘贴开关)导致失效了。

【3】振动电机能够正常转动并产生强烈振动后,把整个机器昆虫的机体放在地面上,让六足底座着地,则可以看到机器昆虫会在平面上振动着移动。
正常情况下,机器昆虫的机体是会走不规则的曲线运动,或者是绕着走圆周运动。
注意:振动机器人要跑在表面光滑并且是硬质的平面上,运动的效果才明显。

假如发现机器昆虫原地转圈,或者跑不动,那么就要对六足底座进行调整。另外,要改变运动的路线,甚至是运动的速度,也都可以调整六足底座。
调整六足底座的方式:
1、调整六足底座上各条腿的角度,改变着地的支撑点以及重心位置;
2、控制同时多少条腿着地,以及哪几条腿着地(不一定要六条腿都着地)。
六足底座对运动的影响:
1、一般而言,着地的支撑点离重心越远,越不容易原地转圈,或者做圆周运动的半径越大;
2、通常,同时着地的腿越少,或者着地支撑越不平稳,则振动的效果越明显,运动的速度也越快。
具体规律大家可以在实践中自己摸索。

成品展示
以下为制作完成的机械黄蜂的造型效果。












