无人驾驶是一个备受关注的概念,但它并不是近几年才火起来的,实际上早在1939年,美国通用公司就已经向外界展出了旗下无人驾驶概念车——Futurama,而这也是无人驾驶汽车最早的雏形,但受困于当时的技术限制,使得汽车无法处理行驶中将要面临的复杂数据,所以这一“幻想”一直等到1970年计算机技术取得突破之后才算正式有了开端。

不过遗憾的是,即便是这么多年走过来,无人驾驶汽车也仍旧没有完全脱离概念的牢笼,而就目前来看,即便是最乐观的估计,无人驾驶的普世至少也要再等待十个年头。
阻碍无人驾驶发展的原因有很多,但基本可以归咎于四个方面:
技术
无人驾驶并不等同于智能驾驶,但后者却是前者实现道路上的必要铺垫,目前,利用雷达和摄像头等传感器来感知汽车周围环境,结合车载计算机联系汽车机体反馈的工况信息计算出后续控制策略,并通过发送指令使汽车完成最终操作的闭环控制已经可以精确到毫秒级别,这意味着该项技术已经十分成熟;而导航系统、自动控速、自动刹车、自动安全技术等功能也已经在某些高端车型上搭载推出,也就是说,无人驾驶汽车在驾驶能力方面已经基本不存在什么大问题了,但在其他方面,比如汽车内置计算机宕机的可能、依赖进行数据共享和分析从而保证高效率的车联网的建设,还有在特殊和极端环境下系统的稳定性等等,仍旧是不可忽视的技术性难题。
安全
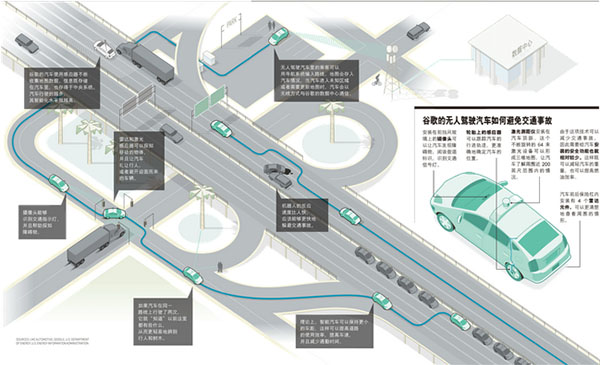
无人驾驶普及起来最大的问题就是如何让消费者相信产品是足够安全的,虽然从理论上而言,利用计算机和传感器来处理路况的无人驾驶汽车反应速度可以成倍领先于人类驾驶者,而无人驾驶汽车对于车辆静态和行驶中的状态分析和措施采取也更加精确到位,同时其将大大优化交通效率并有效减少车辆事故发生的可能,使得车辆安全更高效可控;但不同于技术上更新的快速突破,对于大部分并不关注科技的普通消费者而言,这种观念上的解放需要很长时间的过渡才可以。值得注意的是,Google无人驾驶汽车也曾发生过事故,虽然Google官方给出的解释为当时车辆处于人工驾驶状态,因为驾驶员自身的问题引发了事故产生,但Google无人驾驶汽车已经被强制要求必须有两名驾驶员陪同才允许上路,这在一定程度上说明了在未来的无人驾驶形态当中,驾驶员将担负着监测系统的任务,而驾驶功能则完全由汽车本身来判断和施行的工作分配。
交通与环境
无人驾驶时代的来临,光靠优秀的产品是不够的,但汽车厂商对交通环境的影响力可以说是微乎其微,这也就使得无人驾驶汽车不得不长期处于纸上谈兵的状态。汽车在行驶过程中需要面对着不同的环境变量,而目前的研究和实验可以模拟天气和路况,但却没有办法充分预估道路上可能出现的各种可能性,以我国为例,在摩托车自行车甚至是行人都加入之后的复杂交通环境中,无人驾驶汽车识别和措施的准确程度就增加了变数,即便能够保证不发生事故,但无人驾驶智能高效的优势也无法凸显出来,同时汽车成本也会相应的大幅增加。
也就是说,在没有实现智能交通以前,无人驾驶汽车只是一个华而不实的高科技玩具,而环境变量受制于交通形态,也就是说,只要智能交通得以实现,那么环境变量的问题也就会变得规范秩序许多,但智能交通的规划与建设都需要较长的周期来进行,这也将大幅延长无人驾驶汽车普及的时间。
政策与法律
目前有很多高端汽车已经具备了简单路况下的无人驾驶条件,但是目前没有任何一个国家允许一辆无人驾驶的汽车在公共道路上行驶,事实上,事故问责的制定和相应法规的修改也是阻碍无人驾驶大规模普及的重要原因之一;另外,由于无人驾驶的普及将造成大批原本执行汽车操作任务的人群失业,这也使得政府对待无人驾驶技术的态度并不足够明朗,可以想见的是,如果政府并不认可无人驾驶汽车的意义,那么这种概念上的停顿仍将继续延长;相反的,如果政府大力推广无人驾驶汽车的话,那么智能交通的建设和无人驾驶汽车的普及都会加速实现。
综上所述,作为极端颠覆的科技进步,无人驾驶汽车普及所面临的最大问题并不是来自于自身,而是取决于外界大环境的限制,但不可否认的是,目前智能驾驶向未来无人驾驶的进化将会成为汽车发展的必然趋势,这绝对是一种值得的等待,因为它将是汽车智能和科技进步的终极形态,也将彻底解放人工劳力,而目前,这条代表着下一个科技颠覆的运河还尚未流通,不过它的磅礴和巨大显然已经不容置喙。






