日本筑波大学博士生Aisen Carolina Chacin 和 Takeshi Ozu 研发出一款触觉声呐手套,可以让佩戴者在水下不接触物体的情况下感受到物体的存在。在一些可见度低的情况下,比如发生洪灾后的街道,这款手套可以发挥一些作用。
灵感来自于海豚,该手套IrukaTact (日语中iruka意为海豚)使用回声定位技术在水下对物体进行定位,并用水流的脉冲向佩戴者提供触觉反馈。佩戴者的手越靠近物体,水流的强度就越高,佩戴者的手指也能感受到这种压力。该装置体积较小,佩戴者在感受到物体的时候可以很容易地将其抓起来。
Chacin 说:“我们的目标是增大触觉。如何才能在不接触物体的情况下,感受到物体的不同材质和感知深度,光靠振动是不行的。”
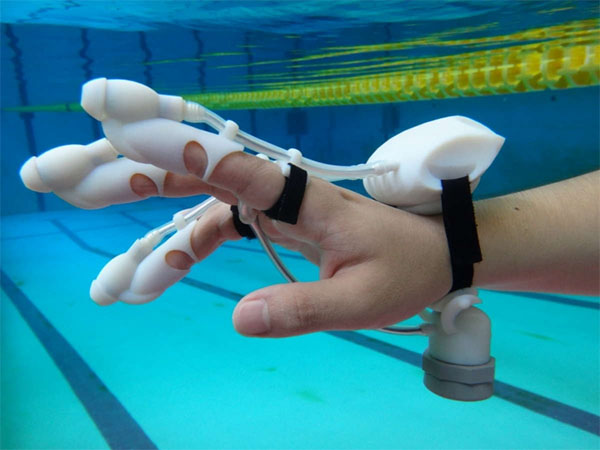
该手套使用了一个MaxBotix MB7066 声呐传感器,三个小型马达,以及一个用来编程的Arduino Pro Mini。三个马达分别安装在食指、中指和无名指上,通过从泵水到指套内,创造出压力反馈。大拇指和小拇指没有指套,是为了使设备更加轻巧,节省电池电量,以及改善运动能力。中指的硅胶指套与手腕上的传感器通过一根导线连接,保持传感器与手掌保持平衡,同时能够读出手掌的方向。该传感器能在水下2英尺左右深度传输信号,不过Chacin 表示未来会尽可能地拓展深度。
该手套有望应用于灾难后的搜索救援,或是落水洞中的人物搜索。它还可以与Oculus Rift等设备搭配使用,装上陀螺仪或加速计,可以带来虚拟现实中的触觉反馈。






