平面关节型(SCARA)机器人主要用于装配作业,可以通过程序精确地控制重复安装工作。 SCARA的全称是Selective Compliant Assembly Robot Arm(选择顺应性装配机器手臂)或Selective Compliant Articulated Robot Arm(选择顺应性关节机器人手臂)。然而用于制造业或研究的机械臂往往售价在1万至4万美元。
英国发明家肖恩(网名Clanzer)用了1年多的时间设计MK3——Scara机械臂3D打印机原型,尚未完工。目前,正在解决精度和齿隙游移问题。
MK1原型用的是50:1的行星齿轮箱,MK2原型用了带皮带的机械臂和滑轮来控制打印比例。但始终未能解决齿隙游移问题。于是,他决定在MK3原型中使用谐波齿轮传动。
谐波齿轮传动价格昂贵,常用于商业机器人。但据说肖恩和他的团队已经找到渠道,批量订购的话会以合理价格提供。这样,肖恩设计的这台Scara机械臂3D打印机成本就能得到控制,适合面向创客们和小型企业市场的销售。
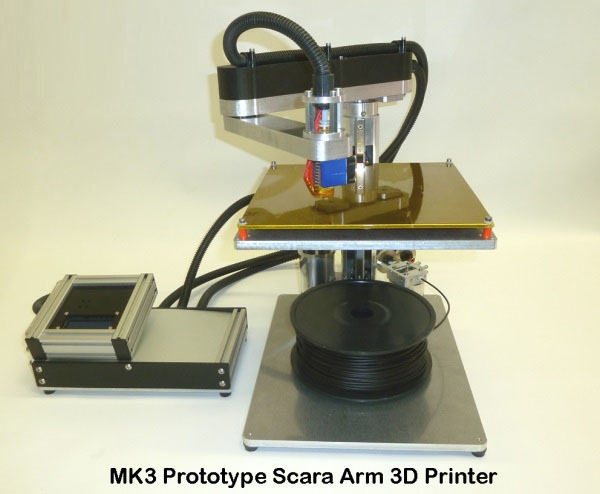
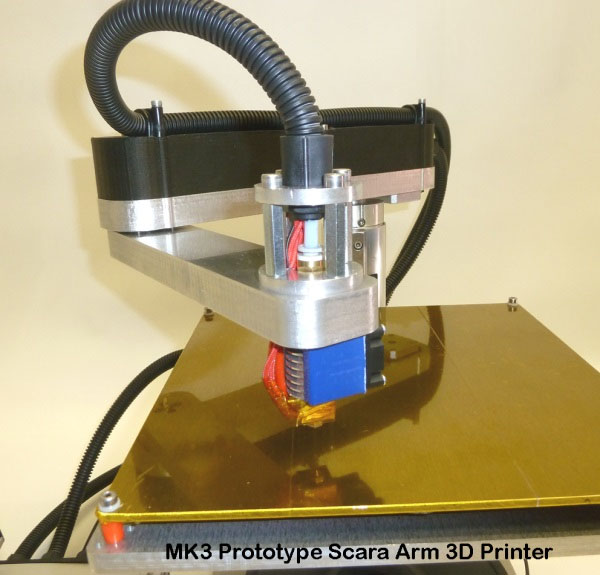
下图为MK3原型,采用现成的30:1谐波齿轮传动,结合微步进和0.9度电机,据说能达到0.013毫米的精度。肖恩说: “但我们预购的定制谐波齿轮传动是50:1,还在运输路上。估计可达到0.007毫米的精度。”“对于大部分3D打印任务来说,这个精度绰绰有余。”

下一代MK4 Scara机械臂将采用这些定制的谐波齿轮传动,而且会进行精简“瘦身”。
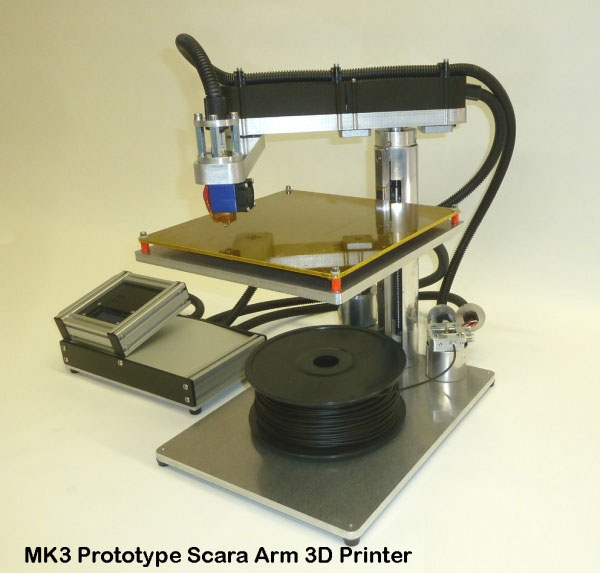
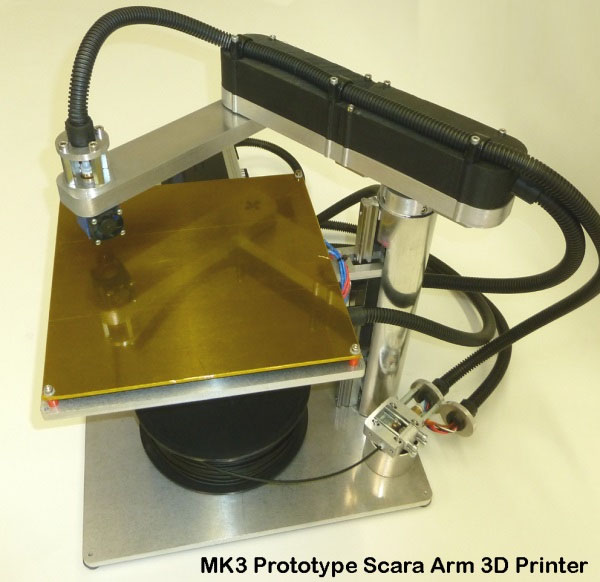
这台打印机的打印空间足够,有250毫米 x 250毫米的加热床作为打印平台,高度为200毫米。机械臂可伸展至400毫米,可以绕着底座旋转360度。
肖恩解释说:“MK3原型已经能精确、稳定地打印。因此,我们将继续软件和固件的研发,通过复杂计算来确保机器运行顺畅。”
“我们正在探讨两种方案。
“一种是采用诸如Smoothie Board之类的开源控制面板,用现有的3D打印控制软件(如Pronterface and Repetier-Host)。我们有足够的研发时间来对其进行改进,并开放源码。
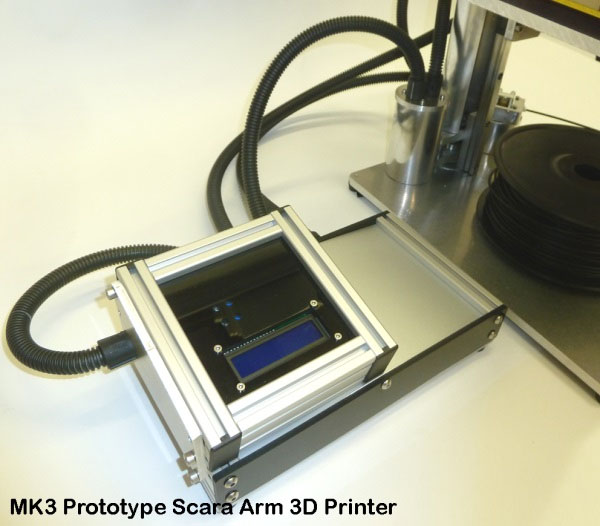
“或者,用我们目前在用的移动控制面板,把精力集中在软件研发上。
“这两种方案正在探讨中。我们将在未来3个月内完成新型号的研发。”
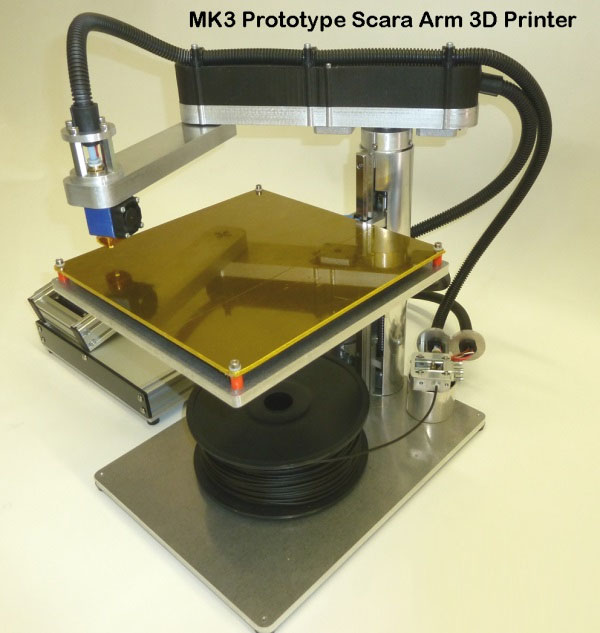
图中所示的是MK3 Scara机械臂与挤出机、加热床的结构。这些组件可以轻松拆卸和替换,比如换成注射器和抓爪。
这不是肖恩研发的第一台3D打印机。2012年,他借鉴CNC框架打造了CNCDudez RouterStrap 3D 打印机,用于蛋糕制作。
文章来源:3ders (MagicFirm 翻译)






